製造工場でモノを作ったり、物流センターで荷物を分類する作業を、複数台のヒューマノイドロボットが協力しながらこなすという技術は、まだ実現されていない。だが、将来的には可能になるとの見通しだ。
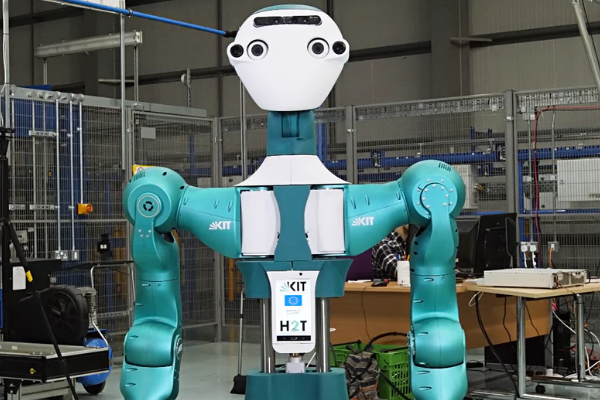
オンラインスーパーマーケット・Ocado、独カールスルーエ工科大学(KIT)、スイスEPFL、英UCL、伊ローマ・ラ・サピエンツァ大学は、人間とロボットの協同作業を目指し、ヒューマノイドロボット「ARMAR-6」を開発した。
ARMAR-6は、EUが資金援助する「ホライゾン2020プログラム」の一環として開発されたもので、開発プロジェクトは別称「セカンドハンズ(SecondHands)」プロジェクトとも呼ばれている。同プロジェクトは、物流センターなどでメンテナンス業務を担当するエンジニアを支援することを目標としている。
今回、プロトタイプが披露されたARMAR-6は、6番目のバージョンだ。初期のARMAR-は、1999年にKIT・高性能ヒューマノイドテクノロジーラボ(High Performance Humanoid Technologies Lab:H²T)のタミン・アスフール(Tamin Asfour)教授チームが開発した。その後、20年間もアップグレードされ続けている。
現在、OcadoはARMAR-6を自社物流倉庫のメンテナンス部門に導入する計画だとしている。物流倉庫内のメンテナンス業務は、人間とロボット間の協働作業が他の分野よりも比較的容易であるとされているからだ。
物流倉庫内のメンテナンス部門は半構造化された環境を備えており、訓練されたエンジニアが配置される。そのような環境で人間とロボットの共同作業が成功裏に行われるためには、AIロボットがエンジニアの必要とすることを前もって性格に感知できる必要がある。例えば、エンジニアがメンテナンス作業中に必要とする道具を要求する前に、ロボットは先に気付いてそれらを提供しなければならない。またロボットは、精度が要求されたり、物理的な力が必要なシチュエーションでエンジニアを支援する必要がある。
今回公開されたARMAR-6には、ふたつの8自由度を持つトルクセンシングが可能なロボットアームが備えられており、腰の部分には6自由度のトルクセンサが2個搭載されている。また機能は劣るが、人のように5本の指を持っており、人の体の下半身格に該当する「モバイルベース」も備えている。これにより、車輪を利用して別の場所に移動することができる。加えて、2-自由度の頭部には、ふたつのステレオカメラとRGB‐Dセンサが装着されている。
海外メディアによれば、今回発表されたARMAR-6はまだモノを上手に掴めないそうだが、セカンドハンズプロジェクトの期限である2020年までに、信頼性が高いヒューマノイドロボットが開発されるか否か、ヨーロッパ中の注目が集まっている。
Photo by YouTube