人間はいろいろな種類のモノが入っている箱から、必要なモノをすぐに取り出し分類する能力を備えている。例えば、組み立て工場で働くスタッフは、箱から自分が必要とする部品を見つけ、製品の組み立てに使用したり、他のボックスに移動・分類できる。しかしロボットには、その人間にはたやすい作業が上手く行えないという欠点があった。
そんななか、MITとプリンストン大学の科学者たちが、様々な形状のモノが入っている箱の中から特定の対象を拾い上げ、その種類に応じて分類・移動させるロボットアルゴリズム「object-agnostic grasping algorithm」と、グリッパーや真空吸着式のカップでものを分類・移動する「ピーク・アンド・プレイス(pick-and-place)」システムを開発した。
研究チームは、同システムを使ってロボットに4つの動作訓練を施した。それぞれ、真空カップで垂直方向に持ち上げる方法、真空カップで側面から吸着する方法、グリッパーでUFOキャッチャーのように垂直方向につまむ方法、柔軟な道具で壁からのものを剥がしてグリッパーで垂直方向につまみ上げる方法だ。成功した事例についてはラベリング作業を実施。関連情報をディープニューラルネットワーク(deep neural network)に入れ学習させた。
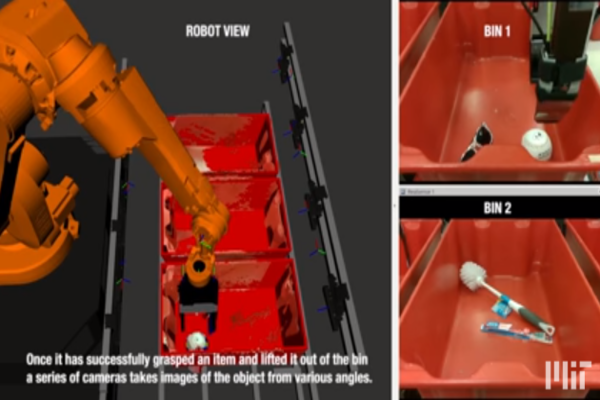
その後、研究者たちは以前には置いていなかった新しい物体をボックスの中に入れ、ロボットに認識・分類作業をさせた。その過程で、カメラを利用して物体を様々な角度から撮影。ロボットに、ライブラリにある最も近い画像を見つけださせることで物体の性質を認知・分類させ、他のボックスに移す訓練を行った。
研究者たちは、開発している技術が、物流倉庫、製品分類、災害現場における残骸撤去作業、キッチンや厨房機器などに活用できると明らかにした。同研究チームは、昨年7月にアマゾンロボットチャレンジに参加しており技術を披露した。今年5月に開催予定の「IEEE ICRA」で、より進展した研究結果を披露するために開発作業を進めている。
Photo by youtube









