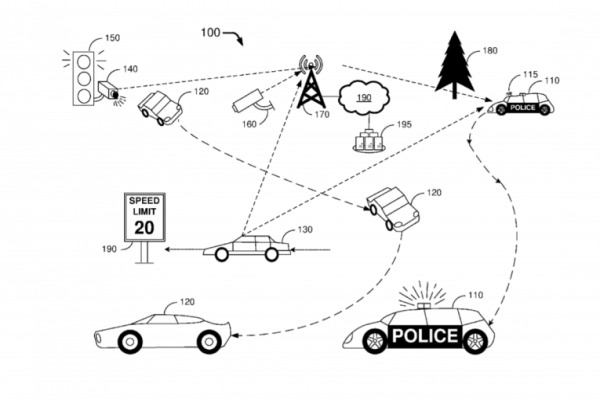
自動車メーカー・フォードが、交通違反を摘発する「自律走行パトカー」(Autonomous Police Vehicle)の特許を出願した。
2016年にフォードが考案したこの自律走行パトカーのアイデアは、AIを使ってパトカーが交通違反を検出。対象車両を追跡し、ドライバーに罰金を課すことができるよう設計されている。車両の中には警察官が搭乗しており、必要な時は警察官がハンドルを握って運転する。
フォードは、自律走行車などの運転支援システムが発達を見せているが、人間が運転する以上、プログラミングを無視して交通規則を違反する可能性があるとし、自律走行パトカーを構想したとしている。
自律走行パトカーは機械学習を通じて交通状況パターンを分析。交通違反を摘発することができる最適の場所を見つけて隠れる。そして、センサー、レーザー、カメラなどを使用し、効率的な方法で交通状況を監視。交通規則のデータベースを検索しながら、問題となる車両を追跡するかどうか決定する。
申請中の特許では、スピードカメラのように違反車両のデータを保存し、警察署に伝える機能も想定されている。また車両間の通信を通じて、対象となる車両が自律走行中なのか、はたまた人間のドライバーが運転中なのかも確認する。もし人間のドライバーが運転していれば、運転免許証のデータを自動で確認。警告のみを与えるか、罰金を課すかなどを決定する。自律走行パトカーが取り締まりを行う間、警官は自動化が困難な業務を遂行する役割を担うとされている。
現在、米国特許庁はこのアイデアについて認めるか否か検討中にあるという。また、実際に実用化されていくかどうかはまだはっきりと分かっていない。が、自律走行車の普及が着々と迫る中、それを摘発するパトカーも知能化していく必要があるという観点は、非常に興味深い話である。なおフォードは、2021年までに完全自律走行が可能な車両を一般に公開すると発表したことがある。
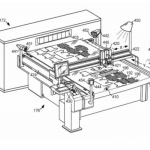
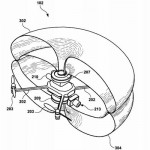
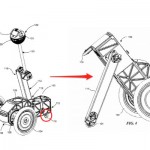
Photo by USPTO