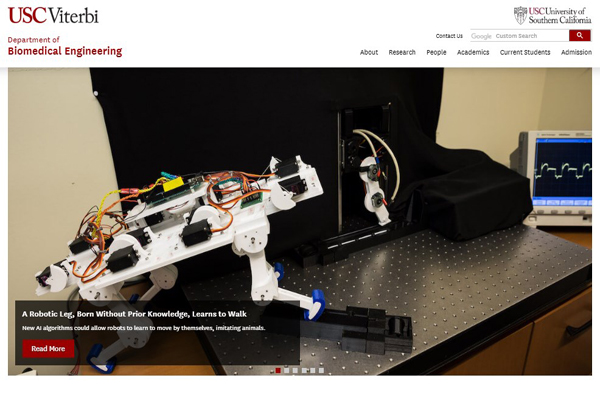
米国・南カリフォルニア大学(USC Viterbi School of Engineering)の研究者たちが、人工知能技術を活用して、一度も学習していない歩行動作を自ら体得できるロボットレッグ(Robotic leg)を開発。研究成果を学術専門誌に掲載した。
開発されたロボットには3つの腱と2つの関節を備えたロボットレッグがあり、歩行に関するプログラミングが事前になされていなくともロボットが自ら歩行方法を体得する。
プロジェクトを牽引するFrancisco J Valero-Cuevas教授は、現段階ではロボットが周囲の世界を理解、もしくは相互作用しようとすると、数ヶ月から数年の学習課程が要求されるとし、自然界の動物のように急速に学習し、環境に適応できるロボットを開発しようと考えていると研究の目標について語っている。
研究チームは、生体模倣アルゴリズムを開発し、ロボットに歩行方法を学習するようにした。ロボットは5分ほど自由に動くと、追加のプログラミング過程やシミュレーション過程なしに新しい歩行方法を学んでいく。より具体的には、足の動きと関連したマップを作成し周囲の環境と相互作用を行うというのだ。
研究チームは、今回開発した技術を発展させれば、ウェアラブルロボットや外骨格ロボットなどに活用できると考えている。もともと着用するタイプのロボットは個人の動きの特性に影響を受けるが、ソフトウェアでその特性をサポートできるという説明だ。もしくは、地球で訓練を受けたヒューマノイドロボットが、火星や月など歩行の学習を受けていない宇宙空間でも動作を実行できるようなるというのが研究チームのひとつの仮説だ。
ちなみに、歩行方法を覚えるなど、急速に環境に適応していく能力を動物が持っている理由のひとつに「生存本能」があるとする専門家たちの意見もある。現在、人工知能は画像認識、音声認識、パターン解析などなど、各目的に沿って開発が進められているが、自ら能力を獲得する学習能力を備えるためには「メタ目的=生存本能」のような、より人間に近い“知能”としての何かが必要となってくるのだろうか。今後、同様の研究の成果に着目していきたい。
Photo by usc.edu