米ハーバード大学のロボット研究者たちが、ストローを使ったセミソフトロボット(semi soft robot)、「アース・ロボット(arthrobots)」を開発した。
ソフトロボットとは、一般的に柔らかい素材で作られたロボットを指す。人間が立ち入ることが難しい場所や、危険地帯で作業を代替する用途で開発が進んでいるが、代表例としては、ヘビ型ロボットやタコ型ロボットなどがある。今回開発されたセミソフトロボットは、ソフトロボットに準じる柔軟性を持ったロボットという風に解釈できる。
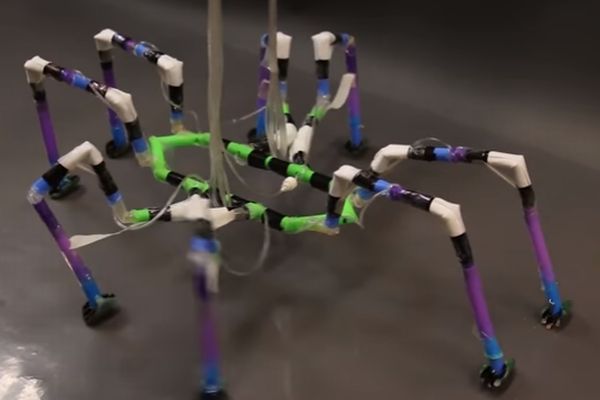
ハーバード大学のジョージ・ホワイトサイズ(George Whitesides)教授と、アレックス・ネミロスキー(Alex Nemiroski)氏らは、飲み物を飲むときに使うストローと、ポリプロピレンチューブを利用して歩行可能なセミソフトロボットを開発した。クモなど節足動物や昆虫は、他の大きな動物に比べて小柄にもかかわらず険しい地形を高速で移動することができるが、研究チームはその移動メカニズムに着眼。アース・ロボットを開発した。
開発に用いられたポリプロピレンチューブは、優れた「強度重量比(strength-to-weight ratio)」を持つ。研究チームはそのポリプロピレンチューブとストローでつくられた部品を連結させ、1~8足ロボットをそれぞれ製作。ストローを曲げられるように調整したのち、短いチューブを挿入して空気が入るようにし、関節を拡張できるようにした。両側にはゴム製の腱が取り付けられており、チューブの空気が抜けると関節が萎縮する仕組みだ。
当初、研究者たちは注射器を用いて空気を注入していたが、後にアルドゥイーノ・コントローラー(Arduino controller)を採用した。アース・ロボットの技術は今後、災害現場における捜索作業の効率化などに役立つものと期待されている。なおハーバード大学の研究チームは、研究成果を専門誌「ソフトロボット」にも掲載した。
■関連記事
-新たな可能性を秘めた「ソフトロボット」特徴とメリット
-【世界初】すべてが柔らかい素材のソフトロボット・オクトボット
-日米韓ロボット科学者たちが協力しソフトロボット技術を開発
-MITがウナギの稚魚のような「魚型ロボット」開発…透明ジェル使い医療に応用
photo by youtube









