スイス連邦工科大学チューリッヒ校(ETHZ)のロボット研究者たちが、人間のように柔らさや滑りやすさを検出し、力の調節を可能にする触覚センサーを開発した。マシンラーニングを使ってシンプルに設計された同触覚センサーは、今後、ロボットの皮膚の発展に向け応用が期待される。
研究チームによると、触覚センサーが装着されたグリッパーは、人間のように物体をしっかり掴んだか否か、もしくは指の間から落ちないかどうかを感じることができ、状況に応じて掴む強度を調節することができるという。壊れやすい、滑りやすい、表面の形が複雑など、センサーがさまざまな情報をロボットにフィードバックすることができる。
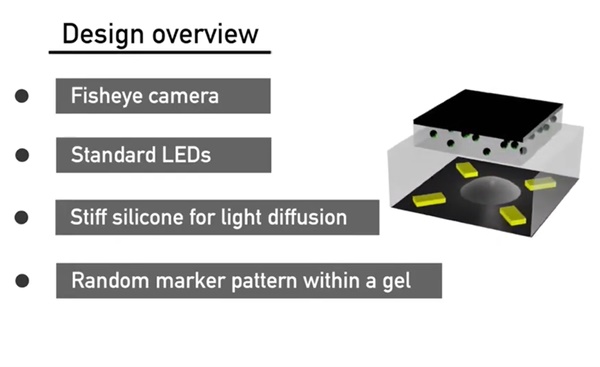
センサーの構造は、弾力性のあるシリコーンゲル(上部)、微細なカラープラスチックビーズ、光を分散させるための硬いシリコン、魚眼レンズカメラ(下部)、4つのLEDで構成されている。
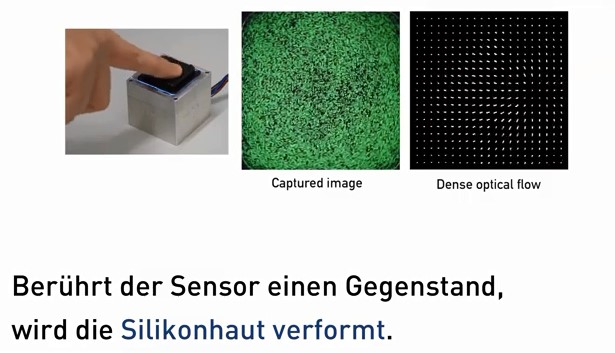
同センサーは視覚センサーをベースに情報を処理する。センサーと物体が接触すると、セ上部のシリコン(皮膚)にくぼみができる。するとビーズのパターンが変化し、センサー下部の魚眼レンズカメラに登録される。このパターンの変化から力の分布を計算する仕組みだ。従来のロボットの皮膚とは異なり、センサー表面に作用する複数の力を区別して、高解像度と精度で計算できるようにしたというのが研究チームの説明だ。なお、同センサーは垂直の圧力だけでなく、横方向の力の作用も認識できるという。
今回開発されたセンサーはロボットハンドだけでなく、さまざまなウェアラブル機器と組み合わせることもできる。例えば、自転車のペダルやジョギングの靴などと組み合わせれば、どこにどのような力が加わるか測定することができる。またバーチャルリアリティ(VR)ゲームの触覚フィードバックの開発などにも応用が期待される。
Photo by youtube