感覚機能が人間の神経系よりも1000倍高速な「電子皮膚」が発表された。物体の形状、質感、硬度などを識別することができ耐久性も強い。
シンガポール国立大学(NUS)の研究チームは、「ロボティクス:サイエンス&システムズ2020」のオンライン会議で、インテル製のニューロモフィックチップを活用した電子皮膚「ACES」を発表した。NUS研究チームは、人間の感覚神経系をロボットに実装できるよう1年6ヶ月間にわたり電子皮膚の開発に注力。ACESをモジュール型で設計することで、安定性も高めた。少なくともひとつのセンサーが残っている場合、センシング機能を維持することができているという説明だ。
ACESはセンサーネットワークに接続した電気伝導体で構成されている。伝導体はセンサーシステムがセンサー間の接触を区別できるよう信号を収集する。60ナノ秒以内に触感を検出することができ、これは現在までに知られている電子皮膚技術の中で最も高速だという。
研究チームは、ACESにインテルのニューロモフィックチップ「ロイヒ」(Loihi)を組み合わせた。同チップは、ACESがセンサーで収集したデータを処理する。20億個以上のトランジスタを含んでおり、「非同期スパイキングニューラルネットワーク」(SNN)の学習プログラムが可能なマイクロコードエンジンを備えている。
SNNはニューロンからのスパイク(電気刺激)が発生した際、刺激が発生したニューロンと接続したニューロンをもとに情報ナビゲーションと入力と出力などを行う技術である。インテルによれば、ロイヒは従来のプロセッサより最大1000倍高速、かつ1万倍以上の効率的に情報の処理が可能であるという。また、「自己位置推定と環境地図作成の同時実行」(SLAM)を従来のCPUで駆動するよりも約100倍少ないエネルギーで実現する。
初期の実験では、研究者チームは点字を読み取るためACESを装着したロボットアームを用意。クラウドを活用して、触覚データをロイヒに伝達した。ロイヒは従来のプロセッサよりも20倍少ない電力で、92%以上の精度で点字を分類したという。
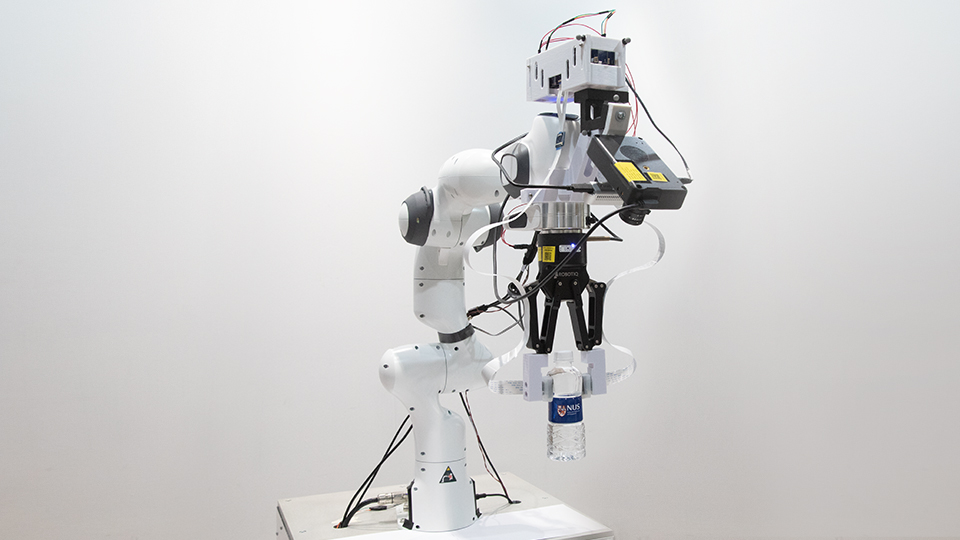
NUS研究チームは、同研究をベースにSNNで視覚および触覚データを結合。ACESの認識能力を向上させた。 ACESの感覚入力デバイスとRGBビデオカメラの録画機能を利用し、それぞれ異なる量の液体の入った不透明容器を分類するようロボットに任務を割り当てた。そして、同じ触覚・視覚センサを活用して、物体把握の重要な指標である「回転活動」(rotational slip)を識別するための知覚システムの能力をテストした。
研究チームは感覚データを確保し、グラフィックスカードとロイヒにそれぞれ送信して情報処理能力を比較した。結果、SNNの視覚および触覚データを組み合わせたシステムの方が、視覚単体の専用システムと比較して、対象の分類精度が10%高かかったと説明。また、ロイヒの方が、グラフィックカードよりも45倍少ない電力を使用して21%高速な情報処理能力を見せたと報告した。
Photo by NUS









