ロボットレッグで自律移動する「ロボット犬」の能力を拡張する、新たな開発結果が発表された。
スイス・チューリッヒ工科大学の研究チームは、ロボット犬がカメラを使用せず、“触覚”だけで雪原や石畳など歩行が難しいエリアを歩行するための、新たなAIシステム(ディープラーニングアルゴリズム)を開発・立証に成功したと学術誌「サイエンス・ロボティクス」を通じて発表した。
研究チームは約1年間にわたり、スイスの森、湖、山岳地帯などでロボット犬「アニマル」の歩行能力をテスト。複雑な地形においても「倒れなかった」と、結果を報告している。
従来の歩行型ロボットは、周囲の環境をリアルタイムで把握し移動形式を決定する。事前に情報が入力された空間では移動することに大きな問題はない。しかし、雪原や泥沼など、条件や環境が頻繁に変化する場合、従来の方法では計算能力が追い付かなかった
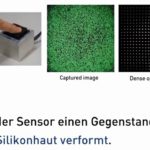
アニマルはAIやセンサーを利用することで、カメラがなくとも、足の位置や体の角度を自ら認識することで、従来の課題を解決する糸口を追求した。例えるなら、人間は目を閉じた状態で触覚だけを頼りに移動が可能だが、それをロボットで実現しようとした。
ロボット犬は、数秒前の動作と現在の動作を比較。地面の高低や滑りやすさなどを推定し制御に活用する。例えば、平地を歩行しながら段差に足がぶつかった際は、少し前の動作と比較して足を上げる必要があると判断する。研究チームは、今回の新たな制御方法について、ロボット自ら学習を行うため他のロボットにも適用しやすく、従来の制御方法よりも参入障壁が低いと説明している。
昨今、各産業の現場や防疫エリアにロボット犬が相次いで導入されている。研究結果は、さまざまなシチュエーションでロボット犬が完全に自律的に移動できる可能性を拓いたと期待を集めている。
Photo by チューリッヒ工科大学