
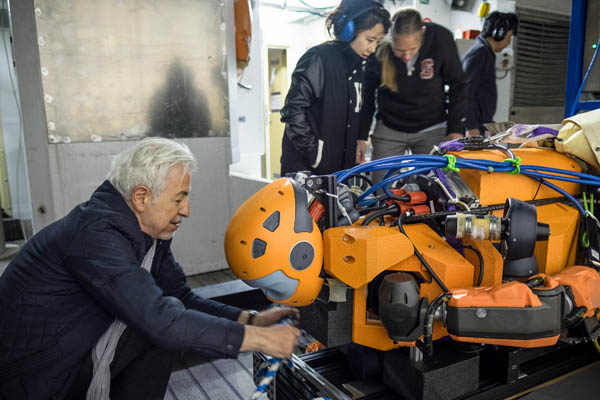
米スタンフォード大学(Stanford University)でロボット工学を専攻する科学者が潜水探査用ヒューマノイドロボット「オーシャン・ワン(Ocesn One)」を開発。フランス・マルセイユ歴史博物館で、その機体が公開された。
オーシャン・ワンは最近、1664年に沈没したフランス・ルイ14世の旗艦「ラ・リューン(La Lune)」号の発掘作業に投入された。そこで、海底に沈んでいた数百年前の花瓶をサルベージするなど、初の実戦タスクを成功裏に終えたそうだ。
開発を牽引したスタンフォード大学のウサマ・カティブ(Oussama Khatib)教授はオーシャン・ワンについて、海底採掘だけでなく深海採掘や海上原油施設管理、そして福島原発事故など、人間のダイバーが作業困難な海中で威力を発揮すると説明している。
オーシャン・ワンはもともと、紅海に生息するサンゴ礁を研究するために開発された水中探査ロボット。人間のような形をしており、ふたつのアームとカメラが搭載されている。
まず、アーム部分には圧力センサーが搭載されていて、握った物体の重さなど、“触覚”を通じて得た情報を、操縦者にフィードバックがすること可能。加えて、作業している海中の水の流れをセンサーで検出・出力を調整して、操縦者が望む方向に、安定的に移動させることができる。

機体を操縦するシステムにはVR技術が搭載されている。人間が海面から専用コントローラーを使って操縦することもできるし、人間のダイバーとコラボレーションして作業を行えるようにも設計されている。一方で、カメラを通じてサンゴ礁のような障害物を回避することも可能だ。
「(専用コントローラーを使えば)ロボットに人間の直感、専門知識、認知能力を供給できる。逆にロボットは、人間にとって危険な地域で作業を代替えできる」(カティブ教授)

なお、カティブ教授は今後、触覚センサーを強化すると話している。意図としては、“まるで人間がそこにいる”かのように作業を展開するため。教授自身は「海の中のアバター」が目標だと表現している。
人間が海底で作業を行う場合、空気供給の困難さや減圧症の危険性がある。オーシャン・ワンのような成功例が増えれば、より長時間、またより安全に水中探索が可能となる。また人間とロボットの能力がより繊細にシンクロすれば、海中探査分野において、これまでにないシナジー効果が発揮されると期待されている。









