自動走行車やサービスロボットが普及する未来。その実現のために、課題となっている技術がある。ロボット同士がぶつかることを防ぐための、衝突回避技術だ。
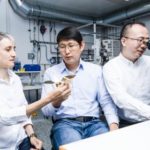
ジョージア工科大学の電気・コンピュータエンジニアリング研究所の研究者たちは、このロボット同士の衝突を回避、また与えられたミッションを実行するためのアルゴリズム構築に成功したと発表した。なお、研究チームは、車輪が付いた小型ロボット・ケペラ(Khepera)IIIを使用して実験。このケペラは、スイス連邦工科大学(EPFL)が開発したものだという。
自律型ロボットは一般的に、移動しながらセンサーなどで周囲の情報を収集し、障害物から一定の距離を取りながら行動するようにプログラミングされている。例えば、自律型ロボットの周囲を、薄いシャボン玉が覆っているのを想像してほしい。障害物と接近しすぎるなど、このシャボン玉が割れない限り、自律型ロボットは移動することができる。
ただこれまで、多数の自律型ロボットが同時に動く場合(近い将来、自律走行車がそこら中で走る姿を想像してほしい)、ロボットたちが互いを認識し、停止してしまうという現象があった。
「(一定のエリア内で)動いているロボットが極端に多いと、彼らは微動だにできない。ロボットは衝突を回避することを最優先するため、停止してしまう」(ジョージア工科大学・電気・コンピュータエンジニアリング研究所のディレクター、マグナス・エガステッド=Magnus Egerstedt氏)
そのため研究チームは、新しいアルゴリズムを開発。結果、自律型ロボットが互いに接近しても、上手く避け合い、もっとも効率のよい経路を確保することで、衝突を回避できるようになったという。
エガステッド氏は、「私たちは、(自律型ロボットの周囲の)シャボン玉(のような領域)のサイズを最小化することで、ロボットの移動経路をほとんど変更することなく、ミッションを達成することができるようにした」と説明。米電気工学技術学会の学術誌IEEEスペクトラム(Spectrum)は、「このアルゴリズムでは、ルールを無視したロボットが侵入しても、他のロボットは衝突を回避しながら移動を続けることができ、実用化が期待される」と評価している。
この技術は、非常に狭い道で自動走行車が互いに往来する時にも威力を発揮する。現在の技術では、「ロボットは非常に保守的に設計されている(中略)数千台の自動走行車が高速道路を埋め尽くした場合、交通が麻痺する」(エガステッド氏)からだ。
エガステッド氏はまた、今後普及が確実視されているドローンなど無人航空機にも、同じようなアルゴリズムが必要だと示唆。すでに、小型ドローンでの実験に成功しているとしている。