人間は自分の姿を想像する能力を備えているが、ロボットにはその能力がない。ロボットは、人間にプログラミングされたり、シミュレーションされた範囲のなかでのみ学習・行動する。言い換えれば、人間が持つ「自我」を、現段階のロボットは持っていない。
そんななか、米コロンビア大学のHod Lipson教授チームが、自らの姿をシミュレート・学習するロボットを開発したと発表した。物理学、幾何学、モーターダイナミクスなどに関する事前の知識がなくとも、ロボットが一から自分で学習し特定のタスクを実行することができるという。研究成果は「サイエンスロボティクス」に掲載された。
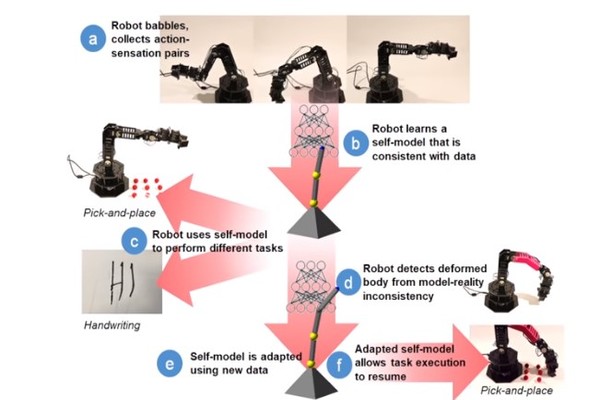
新しく開発されたロボットは、当初、自分の形状に関する手がかりを何も持っていない。ヘビの形なのか、クモ形なのか、アーム形であるのか分からないのだ。しかし、「自己シミュレーション(self-simulation)」段階を経ると、新しい環境に適応。自分の壊れた部分を認識して修理したり、新しいタスクを実行できるようになる。
「ロボットが彼らの創作者(人間)が規定していないシナリオに適応するためには、自らシミュレートすることができる学習能力を備えることが不可欠だ」(Lipson教授)
研究チームは、今回の研究のために4自由度のロボットアームを3Dプリンタで製作した。このロボットアームは、当初、関節がどのように繋がっているか、またどのような形か自ら認識できない。そこで、研究チームは、ロボットアームの軌道情報を数千個を収集。続いて「自我モデル(self-model)」を生成するためにディープラーニングモデルを適用した。 35時間程度のトレーニングをした後、ロボットは「ピック・アンド・プレース(pick and place)」を実行できるようになった。
研究チームはまた、「自我モデル」が自ら損傷部位を発見できるかどうかを調べるために、破損した部品をロボットアームに挿入した。するとロボットアームは、自ら破損した部分を認識。破損具合に合った新しいトレーニングを経て、ピック・アンド・プレースのタスクを実行できることが分かった。研究チームは、今回の研究が狭い人工知能(narrowAI)から抜け出し、汎用人工知能に進むために必要な過程だと説明している。
Photo by Columbia Engineering(via youtube)