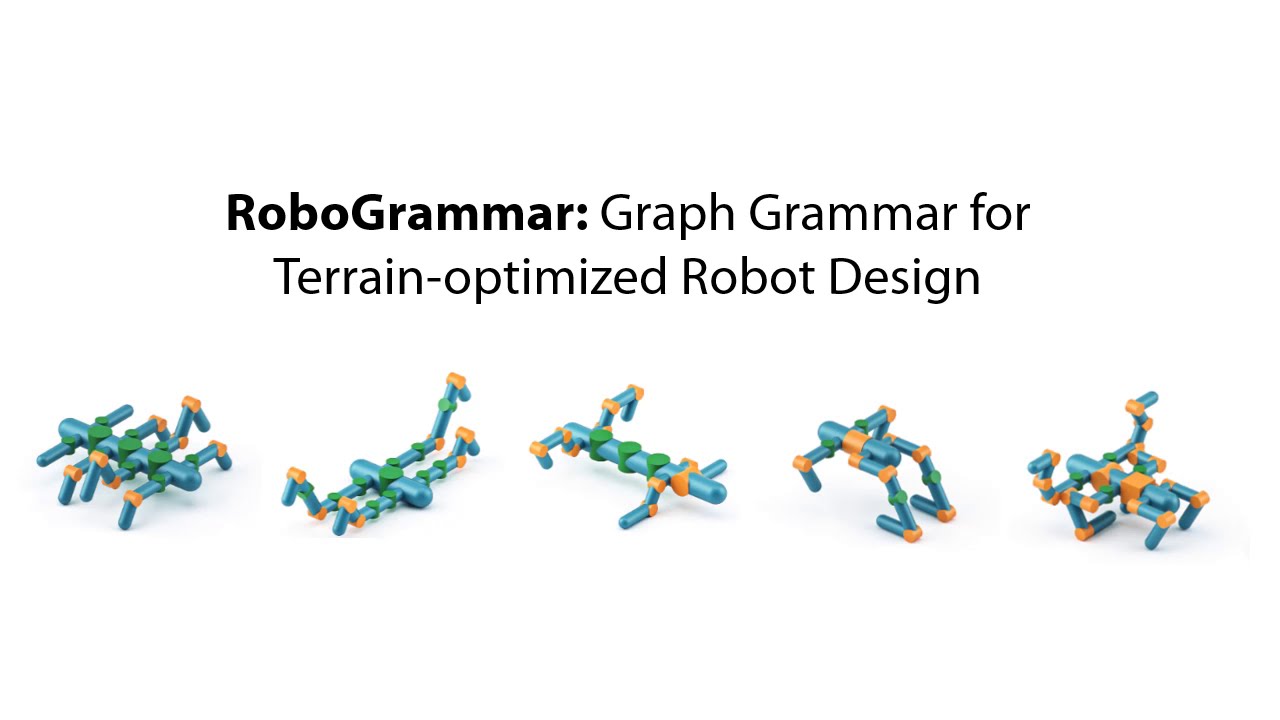
マサチューセッツ工科大学(MIT)のコンピュータサイエンス・人工知能研究所(CSAIL)に所属する研究グループが、ロボット設計プログラム「RoboGrammar」を開発したと報じられた。
従来、段差や険しい地形を歩行するロボットを開発するために、ロボット工学者たちは人間のような2本足にすべきか、昆虫のようにより多くの足にすべきかを悩む。その際、RoboGrammarを活用することで、タスクの特性に合わせてロボットの形態を容易に設計することができる。これまでロボット工学者たちは設計作業を手作業に依存してきた。
論文の主要著者・Allen Zhao研究員は、RoboGrammarはより効果的かつ創造的なロボットの設計を行うための新しい方法と紹介している。
ロボグラマシーは、3つの段階を経てデザインを生成する。まず「問題の定義」、ふたつめが「可能なロボットソリューションの描写」、そして「最適なロボット構造の選択」だ。ユーザーは、問題を定義し、活用可能なロボット部品(モーター、足、車輪、接続部分など)、そしてロボットが克服すべき地形構造(階段、平地、斜面など)を入力する。入力値を入れるとRoboGrammarが基本ルールとなる「グラフグラマシー」をもとに、数百種のロボットの構造を提示する。
次にロボットが現実の世界で動作するように息を吹き込むプロセスを経る。ここで重要なのが、ロボットの動作を制御するコントローラだ。研究チームは、「モデル予測制御」(Model Predictive Control)と呼ばれる人工知能アルゴリズムを用いて、ロボットコントローラを開発した。ニューラルネットワーク技術が、繰り返し、それぞれのロボットの設計方法についてサンプリングし評価する。このような過程を経て最適なロボットおよびコントローラがつくられる。
Allen Zhao研究員は、RoboGrammarがロボットの構造に関する空間を拡大させてくれる、ロボットデザイナーのためのツールになるだろうと説明する。研究チームは、ロボグラマシーが単に地形を克服することを超え、今後ロボットの様々な用途に合わせて最適なデザインを生み出す方向に技術的に進化していくとだろうと予想している。
【Photo by YouTube】