ロボットが人間と共存するためには、「パーソナル空間」の理解が必須となる。例えば、混雑した場所で周囲の人を押したり、追突したりすることなく移動するなどが、その具体的なシチュエーション例となる。
フランスのトゥールーズ大学のHarmish Khambhaita氏とRachid Alami氏は、人間のマナーを真似て順番を守ったり、時に道を譲歩できるパーソナル空間を尊重するロボットを開発中だ。
Khambhaita氏は、ロボットは今後、人間が何をしたいか、またどのような反応をしようとしているか推論しなければならないと、研究の意図を説明すしている。ある意味、自動走行車の課題と似ているが、人間の行きかう環境は車が走る道路よりもはるかに予測が困難かもしれない。というのも、道路にはすでに交差点や信号がありそれらの情報は、事前に確保することができる。一方、人が多く集まる空間には“定まった経路”というものはなく、皆、自由気ままに動くからだ。
ロボットは、一般的に2段階のプロセスを経て動いたり、歩き回る。まず他の物体がどこにあるか予測、次いで移動方法を計画するプロセスだ。しかしそのプロセス間に予想外のことが起きると、ソフトウェアは止まってしまうケースがある。
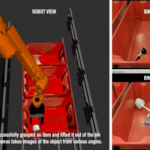
そこで研究チームは、エチケット学習のためにロボットのナビゲーション機能のアップグレード。ふたつのプロセスを結合し、計画された経路を継続的に更新する新しいソフトウェアを作成した。作成方法としてはまず、2台のレーザースキャナでロボットに周囲の物体を検出するように設定。加えて、モーションキャプチャシステムを使用(ボランティアのヘルメットと連動)し、人々の位置を追跡するようにした。ロボットは0.1秒ごとに変更状況を把握。次の予想と軌道更新作業を繰り返す。
研究チームは、両側に部屋がある15×20メートルの廊下で、同ロボットをテストした。ロボットは「誰かが廊下から向かって歩いて来るとき」、「ふたりがロボットの両側を通り過ぎるとき」、「角から人が現れる時」などのケースで、人を上手く避けたり、道を譲ることに成功している。
Photo by YouTube