国内および海外の大企業が相次いで進出しているロボット産業。欧米、アジアの主要国も、国家的かつ積極的な後押しを表明しており、今後、グローバル市場における覇権争いは混迷を極めることが予想される。そんななか、日本のロボット産業の現状はどうなのか。また、これから先の未来はどうなるのだろうか。その疑問に答えるため、ロボティア編集部では日本のロボット分野の専門家たちにインタビューを敢行。今回は、日本ロボット学会 事務局長・細田祐司氏に話を聞いた。
以下、インタビュー
―まず、日本の強みである産業ロボット研究の現状からお伺いしたいと思います。現在、大学や研究分野では、どのような議論がなされているのでしょうか?
日本の学界ではここしばらく産業ロボットに関する研究はそれほど活発ではなかったと言えると思います。その背景を理解するためにも、日本と産業ロボットの歴史に触れる必要があるかもしれません。
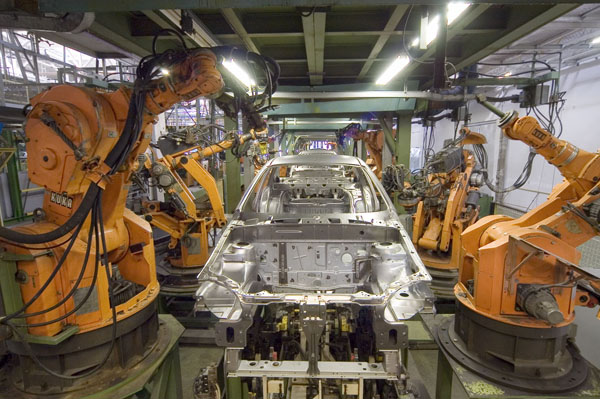
まず、日本はロボット大国と言われるとおり、他国に比べて産業ロボットの導入が進んでいます。これは、産業ロボットメーカーの地道な努力や、ロボットの導入を進め自ら自動化製造ラインの開発を進めた自動車産業などの企業努力による功績に依るところが大きいと思います。
日本では1970年代くらいから、大企業を中心に溶接、加工ロボット等の導入がはじまりました。簡単に導入と言っても、使いこなす側にも技術や財力が必要になります。日本の大手企業は使い手として高い技術を蓄え、産業ロボットが活躍できる設備投資を進め、ヘビーユーザーとして産業ロボット市場を支えました。ロボットメーカー側もそのような支えの中で開発に拍車をかけ、ビジネスとしてのサイクルが上手く回ることにより、80年代にはロボット大国・日本になったという経緯があります。
産業ロボットの実用化は、1960年代に米国ユニメイド社やジョセフ・F・エンゲルバーガー博士等が先鞭をつけ、これをきっかけにして、日本の大学は、産業ロボットの核となる技術の研究を始めました。一方、それらをブラッシュアップし、現在の日本の趨勢に繋げたのはメーカーでした。そのような背景で、産業ロボットが普及し始めた黎明期には、学会や大学などの研究側の寄与も多かったと考えますが、事業化が進むにつれ研究側の手が離れていきました。
現在、大学での産業ロボットの研究が少数派なのは、学問的な意味ですでに“枯れた”分野だという認識があったからだとも考えられます。90年代まで大規模な生産工場で導入されていた産業ロボットの基本技術は、定められた位置から目標地点までアームを移動させたり、動作を精密に制御したりすることでした。それらは古典制御理論や、ティーチングプレイバック(教示と再生)などの技術を使用すればある程度達成でき、それらの基本技術を成立させる研究はすでに進んで久しかっただけに、学問ベースで何か手を加えるという余地はあまりありませんでした。
続く90年代終盤からは、産業ロボットの機能を飛躍させようという動きが始まりました。導入当時の産業ロボットは、教えられた動作を繰り返し、高精度に、素早く、何時間も休まずこなすという機能により有効な戦力となっていました。一方、ロボットによる作業を可能にするために、ロボットの作業環境を徹底的に精密に整えることが必須でした。このため、大企業の大規模な生産システムのもとで同じ製品を大量に作って採算を取るビジネスモデルが、導入の前提条件になっていたのです。
しかし、90年代終盤になると産業構造に変化が現れ始めました。少品種大量生産から、多品種少量生産に変わり始めたのです。工場の製造現場の方も、人手を使用して器用に取り回しできるような形にシフトされていきました。このような変遷のもとに、産業ロボットも、眼や触覚などのセンサー技術を拡充し、人間とともにラフな環境で作業ができるような能力を求められるようになりました。同時に少子高齢化で労働力が不足し始めたため、産業ロボットを発展させ、より産業構造に適した自動化を達成することが社会的課題にもなり始めたのです。
そのような変化を受けて、2000年代に入り産業ロボットに変化が現れはじめます。3次元ビジョン、ステレオビジョン、高速カメラなどを搭載し、ある程度ラフな生産ラインにでも適応して作業できるものが製品化されてきました。ただその段階の技術も、学問的には70年から80年代に基礎的なところは確立していたものです。例えば、レーザービーム投射で3次元形状の把握をする様な技術です。それらの技術が、約20年~30年経過して、製品としてものになり始めたのですが、こちらも企業側がブラッシュアップを続けて、信頼性を上げてきたという経緯があります。

冒頭に申し上げた「それほど活発ではなかった」という意味は、そのような学問としての研究と実用化開発の間のタイムラグが関係しています。ロボットの実用的な利用のためには技術を枯らして信頼性を追求する必要がありますが、一方、新規性を追求する学問的立場からは、枯れた技術は、研究対象としての評価を得にくいという背景がありました。
しかしながら、産業分野の自動化の広がりに伴い、より飛躍的な技術が求められる段階が来ました。これまで産業ロボットは、主に自動車産業などの重工業分野で使用されていたのですが、さらに他の産業にも応用しようという動きがあります。例えば、食品加工業とか、繊維業界などです。ここでは、より柔らかい素材など、ロボットが扱うのが苦手とされてきた分野への適応を迫られています。
そこには、素材に対する触覚機能や、不定形形状の認識などが含まれ、ワイヤー、ハーネスなど不定形部材を器用に配置したり、結んだりするような作業が求められています。さらに、不定形物を対象とした作業をどのようにロボットに教えるかという点も、注目されている技術分野です。最初の動作を精密にコントロールすることが第一段階、90年代後半から2000年代にかけての視覚センシングの実用化を第二段階とするならば、これは第三段階と言うことができるかもしれません。この第三段階になると、研究すべき要素はまだまだ多く、学会の発表もこのような分野で活性化しています。
加えて、使う側に優しい産業ロボットの開発も望まれています。先に申し上げた通り、これまでの産業ロボットは使う側に使いこなすスキルや資本が必要とされていました。ある意味、使う側の負担があればこそ成立していたと言えるでしょう。
今後は、中小企業等に広く産業ロボットの利用が普及するように、「スキルを持たなくても使えるためにするためにはどうすればよいか」という点を、解決していく必要があります。
―欧米ではすでに、中小企業向けの産業ロボットが加速しているという報道が目立ちますが客観的にどうご覧になりますか?
これまで、世界各国の中小企業で産業用ロボットの導入はそれほど進んでいなかったと思いますが、最近話題のIndustry 4.0では、もともと中小企業の活性化に力を入れていたドイツが、工場のデジタル化を推進する中で、中小企業での産業ロボット利用普及のテコ入れを初めていることが新しい流れとして注目されています。アメリカも同様な動きを始めており、ドイツと手を組んで、世界的な標準化を図る動きがあります。
現状、日本はこの流れに対しあまり積極的ではなく、世界的に後れを取るのではないかと懸念されます。一方、日本のお家芸であるロボットを活用したリアルなもの作りのノウハウは、容易にデジタル化できないものであり、そこに日本の勝機があるように思われます。
―産業ロボットは今後、どのような方向で発展を遂げていくのでしょうか?
学会の大きなテーマの一つとしては、タスクプランニングがあります。分かりやすく言えば、人間が厳密なプログラムを組まなくとも、ロボット自身が人間の作業を“概ね”把握して、作業をこなし、作業計画まで立てるというものです。
人間が人間に作業を教える際は、「こうゆう形のものを、こうゆう感じで」という風に概要を伝えることができ、ロボットに対するように細かくすべてを教え込むということはしません。そのように、人間に指示するレベルの要求をロボットが解釈、分析できるようにする。また作業の段取りなど、最終的にロボットがどのように作業すればよいかの計画まで立てるのがタスクプランニングです。ある意味、その性能に達すれば究極の産業ロボットと言うことができますが、学会の研究レベルとしても未解決の問題が多く残されています。
大学や学会としては、そのタスクプランニングなど第三段階以上が、今後の研究の焦点となっています。これは海外でも同じ様子です。今年、ドイツでIROS(International Conference on Intelligent Robots and Systems=知能ロボットとシステムに関する国際会議)という国際シンポジウムがあったのですが、そこでもタスクプランニングの発表が盛大に行われていました。
―いわゆる究極の産業ロボットを作るアプローチというのは、どのようなものが考えられるのでしょうか?
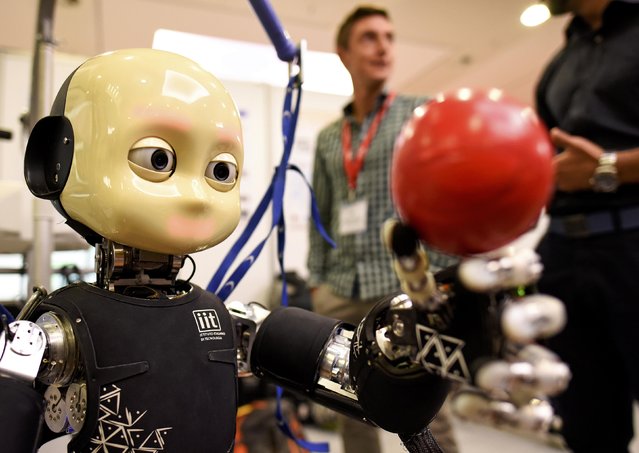
まず一つは人工知能などを導入するパターン。いわゆる人間の真似ですね。国際電気通信基礎技術研究所(ATR)等では、人間の動作を見てロボットが学習するという研究を行っています。もう一つは力技のコンピューターサイエンスで、徹底的に知能作業ロジックを組み上げるというのもアプローチだと思います。
現時点では、センシングのロバスト性等不足している部分も多いのですが、これからはやはり知能化―作業知能というものをどう発展させるかがより大きな課題となりそうです。
―これまで、産業ロボットの変遷過程や学会における課題の変化についてお話をお伺いしました。その他に、産業ロボットの課題として議論されている点はありますか?
最近は、産業ロボットをより安全にしようという議論が活発です。これまでの産業ロボットは、スピーディーかつ正確な作業が行えましたが、人間と完全に隔離された柵の中でしか作業ができませんでした。これに対し、少量多品種生産に経済構造がシフトしてくると、人間と一緒に作業しなければならないシーンが増えてきました。
そこで課題となってくるのは、「ロボットを柵から出して、人間とともに作業させるためにはどうすればよいか」という点です。周囲をセンシングする機能を高めて、人とぶつからない技術、人とぶつかっても危害を最小限にする技術を発展させる必要があります。また、ロボットの関節を柔軟にしたりする技術の追求なども求められます。安全工学の歴史は長いのですが、ロボットの様に動作が多様で複雑な対象に対しては、多くの課題が残っています。
>>後編「夢物語でロボットは作れない、日本の学会とロボット研究」

細田祐司氏。日本ロボット学会事務局長。日本ロボット学会は学問領域の進展を目指し、研究発表と技術交流の場を専門家に提供することを目的に、1983年1月28日に創立されました。2014年12月現在、正会員、学生会員の数は約4,100名、賛助会員数は68団体となっています。
事業の概要として、学術論文とロボットに関連する最新の状況の解説記事の特集を収録した「日本ロボット学会誌」、欧文誌 "Advanced Robotics"の発行、「日本ロボット学会学術講演会」、「ロボティクス・シンポジア」の主催,ロボティクスに関する新しい分野や基礎的な内容を対象としたセミナーなどの企画・開催、論文賞,実用化技術賞,研究奨励賞等の賞を設けることでロボットに関わる分野の学問・技術の奨励、そしてロボット関連の研究専門委員会の活動の支援を行っています。また、国内外の学会等と協力してシンポジウムなどの開催も行っています。IROS、RO-MAN等の国際会議もこれに含まれます。