ソフトロボットの能力を競う国際大会が初めて開かれる。
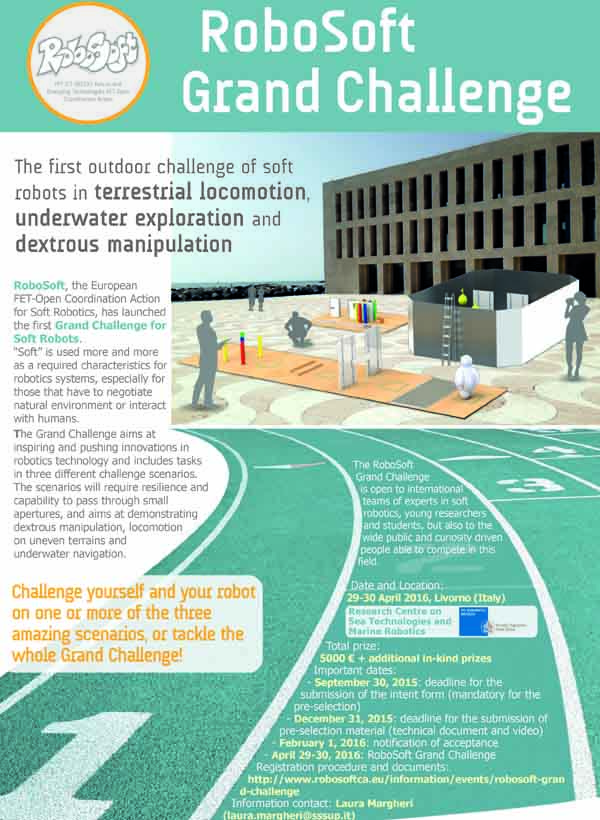
きたる2016年4月29日から30日までの二日間、イタリアの港町「リヴォルノ」で、第1回「ロボソフトグランドチャレンジ(The RoboSoft Grand Challenge)」が開催される。同大会はEUの「7次フレームワークプログラム」の資金支援を受けて行われるもので、イタリアのバイオロボティクス研究所、英ケンブリッジ大、ブリストル大学などの専門家を中心に組織委員会が設けられた。
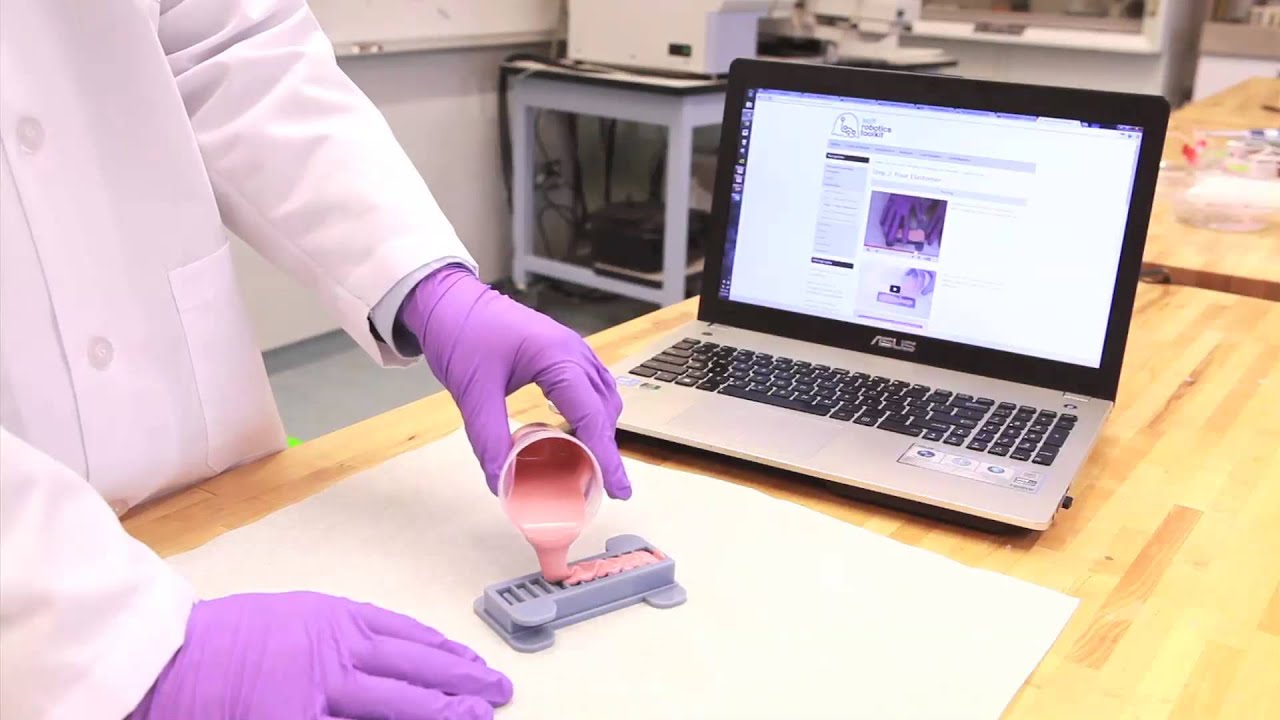
なおソフトロボットとは、言葉の通り“柔らかいロボット”である。本来、ロボットと言えば硬い金属で覆われているイメージがある。しかし、人間とともに生活したり、職場をともにするロボットは、人間と接触があった際にも安全でなければならない。また介護現場などでは、ロボットと接する人間が不安を抱くことがないように、愛着を持ってもらう必要がある。そのため、産業用ロボットや介護用ロボットには、柔らかい素材でできたロボットの存在が望まれている。2015年2月に理化学研究所が発表した「ROBEAR」や、映画で人気の「ベイマックス」を想像してもらえると分かりやすいかもしれない。
一方、人間が入れないような環境や構造物には、形を柔軟に変え、対応できるロボットが必要になってくる。例えば、瓦礫の合間を形を変えながら移動し、要救助者を発見するなどのタスクにはソフトロボットの開発が必要となる。
また、ソフトロボットは「知能的」または、状況に「柔軟」に対応するという意味も含まれる。機械はプログラミングされた動作は正確にこなすことができるものの、そのプラグミングを施す人間が想定してない状況や、「なんとなく」もしくは「大まか」にタスクを処理することが苦手である。いわゆる「フレーム問題」に部分的に対応できるロボット=ソフトロボットと言い換えることができそうである。
ソフトロボットには、ソフト・ロボティクス社のエンド・エフェクター、ニューボティックス社のロボットアーム、MITの魚ロボット、ハーバード大の柔軟ロボットなどがある。

「ロボソフトグランドチャレンジ」の地上部門では被災地を想定。人間が近づくのが難しい建物や空間にソフトロボットが入り、ミッションを遂行する。例えば、砂場を通過したり、穴に入ったり、階段を登るなどだ。マニーピュレーション部門では、物を他の場所に移動させたり、ドアノブを開く動作を競う。海中部門では、水中に入って50cm程度をジャンプしたり、サイズを変えながら小さな穴を通過するなどのタスクが課題として挙げられた。またサンゴ礁などを損なわずに藻類だけを除去するなどの課題もある。
専門家たちは、今後「硬いロボット(hard Robot)」が実行するのは難しい作業を、ソフトロボットが実行してロボットイノベーションを牽引すると予想している。









