
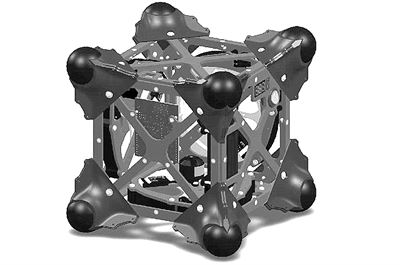
米航空宇宙局(NASA)が、無重力状態で惑星の表面に着陸が可能な「ヘッジホッグ・ロボット」(写真)を開発したと、BBCが8日に報じた。ヘッジホッグ・ロボットは、火星探査機「キュリオシティ」とは異なり、車輪や足がないサイコロの形の小型探査船である。探査船は、重力が少ない惑星の表面に着陸して、移動することが大きな課題であった。しかしヘッジホッグ・ロボットは、地球の重力の10万分の1の圧力でも、動作するように設計され、期待を集めている。
腕と脚の代わりに、ボディのなかのフライホイールが重要な役割を果たす。フライホイールがエンジンスピードを調節すると動力が生じる。エンジンを保護するために、各コーナーには、ハリネズミのようにスパイクが装着されている。このスパイクを使って、所定の位置で転がる、跳ねるなどのアクションを行う。どんな環境でも着陸、移動任務を遂行するのを助ける。スパイクのなかに打ち込まれている熱感知器で、地表面温度を測定することもできる。ロボットは、8つのスパイクと3つのフライホイールで構成されている。
ヘッジホッグ・ロボットは、遠心力と慣性で動き、地球では動きが遅い。しかし、無重力状態では、柔軟なジャンプと回転移動を自由に行うことができる。基本動作は、「yaw」なと呼ばれ、これは「一方的に傾く」という意味である。自ら動く方向を定め、スパイクを用いて所定の位置からジャンプする。惑星の表面にあるくぼみに落ちたとき、以前の探査船は、閉じ込められてしまうのが常であったが、ヘッジホッグ・ロボットは竜巻状に回転し、これを数秒で抜けられる。
ヘッジホッグ・ロボットプロジェクトは、NASAジェット推進研究所(JPL)、スタンフォード大学、マサチューセッツ工科大学(MIT)が共同で参加した。スタンフォードの研究者マーク・パボンは「エンジンをどのように制御するかに応じて、ジャンプの角度を変えることができる」と説明した。
NASAジェット推進研究所が製作したヘッジホッグ・ロボットの重量は5kgほどだが、カメラやその他の機器を取り付けると4kgほど増える。スタンフォードのそれは、より軽くスパイクの長さも短い。研究者たちは、地球からの命令なしにロボットが制御できるかどうか研究中だ。まだ実際に現地に投入される計画はないが、砂、岩、氷の上、柔らかく脆い場所など、ロボットが自律的に動くことができる範囲をテストしている。
ILLUSTRATION BY NASA/JPL-CALTECH/STANFORD









