米マサチューセッツ工科大学(MIT)の研究グループが、飛行と地上走行が可能なドローンを実験している。ドローンおよび車両がそれぞれ持つ欠点を補完する、新たな交通輸送手段を開発するのが研究目的だ。
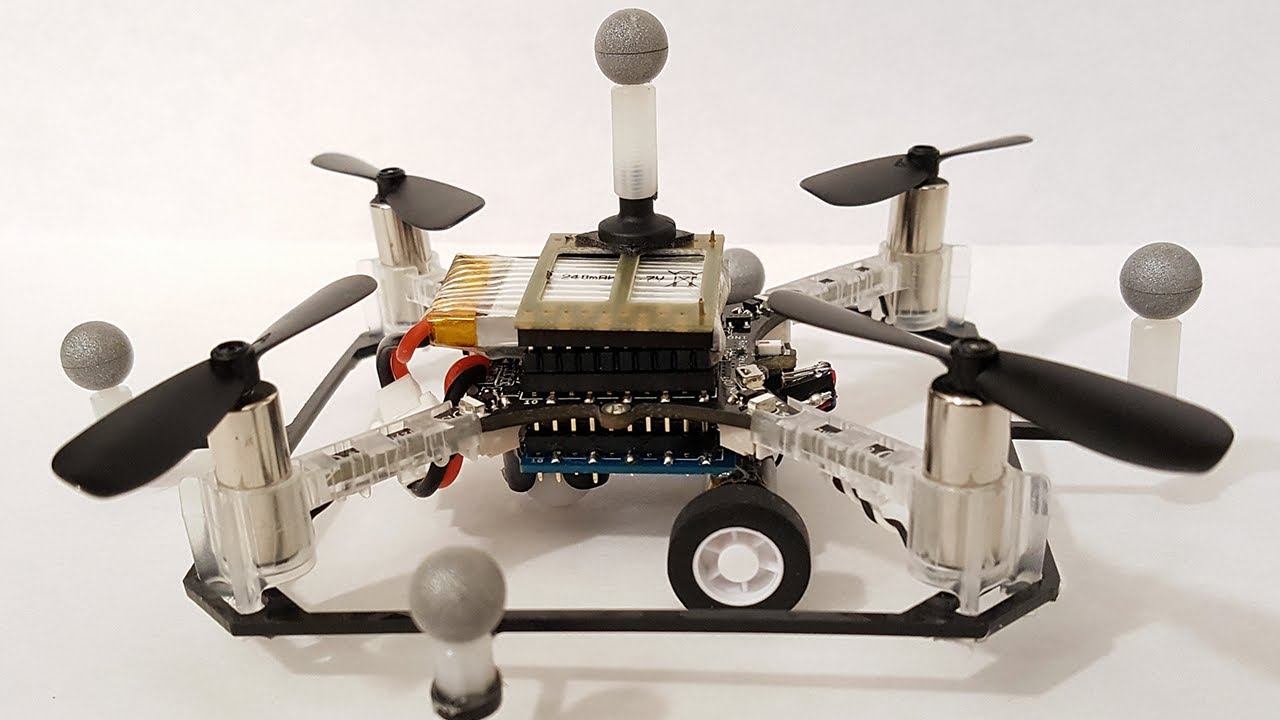
ドローンは高速飛行が可能だが、バッテリーの有効時間に制約がある。そのため、長距離を移動するには向かないという欠点があった。一方、地上を走行する車両はエネルギー効率が高いが、ドローンよりも機動性に欠ける。そこでMITの研究者たちは、ドローンに車輪を追加して、上空と地上どちらも移動できるように改良した。
開発を牽引するMITコンピュータサイエンス・人工知能研究所(CSAIL)は今月初め、米国電気電子学会(IEEE)がシンガポールで主催した「ロボット工学・自動化国際会議」で、その空地両用ドローンを公表した。海上では、道路や建物、駐車場の飛行禁止区域、離着陸場など都市環境をミニチュアで再現。8台のドローンが自律的に飛行、また走行するシステムが披露された。
研究論文の第1著者であるブランドン・アラキ(Brandon Araki)氏は、「一般的なドローンは地面を走行することができない(中略)車輪を取り付けたドローンは飛行時間が少し短くなるものの、はるかに機動性に優れている」と強調した。
なお、今回開発されたドローンでは、車輪の重量のためドローンのバッテリー有効時間が減少。最大飛行距離は、車輪がないときと比較し14%減った。それでも、地上を走行することで、移動性の“損失”は相殺されるというのが、Araki氏の説明の趣旨だ。
CSAILのダニエラ・ラス(Daniela Rus)氏は、人間を乗せて運用できるようになることが課題としつつも、“空飛ぶ車”の可能性を示したとして研究成果を評価している。
■関連記事
-人間と機械がテレパシーで作業!? MITとボストン大学が脳波でロボットを制御するシステム開発中
-MITがウナギの稚魚のような「魚型ロボット」開発…透明ジェル使い医療に応用
-MITメディアラボ・伊藤穰一所長らがWEF2017で議論…「人工知能の民主化と道徳」
-バイクとドローンが合体!…世界で続々誕生する「有人ドローン」
-中国「EHang(イーハン)」27歳CEO「最終目標は地球上の全ドローンを制御するシステム」
photo by CSAIL









