機械工学および生体医工学の研究者であるコナー・ウォルシュ(Conor Walsh)助教授の研究が注目を集めている。
ウォルシュ氏とハーバード大学ワイス研究所(Wyss Institute)の共同研究者たちは、米国防総省の国防高等研究計画局(DARPA)に資金提供を受け、日常的に重い荷物を運ぶ兵士の耐久性を向上させるため、「Exosuit(エグゾスーツ)」を開発している。軍事目的だけではなく、運動障害を抱えている歩行困難者、患者をサポートする際にも使用されるものとの期待がある。
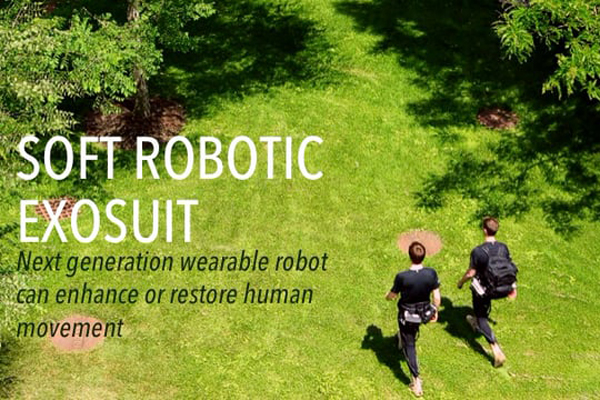
ウェアラブルロボットのアイデアそのものは決して新しいそのものではない。ただし、以前のものは「外骨格」の名の通り、硬いフレームで作られていた。一方、ウォルシュ氏が開発を進めているロボットスーツは、本来の“スーツ”の目的により近い。ウォルシュ氏をはじめとする中核研究員たちは、生物学的なインスピレーションを受け、人の体の動きをサポートするソフトロボットを製作しはじめた。それは軽く、効率的で、衣服の生地に組み込まれているという点で革新的だ。
ラボでは、ナイロン、ポリエステル、スパンデックス製で、ユーザーの腰、太もも、ブーツにぴったりと調節することが可能なスーツを生産している。ユーザーが歩くとき、インソール(足底版)に埋め込まれたセンサーが、アクチュエーター・ボックスに信号を送信する。アクチュエーター・ボックスは、バックパックやウエストベルトに装着することができるようになっている。また、コンピュータープロセッサーが、歩行者の足取りを追跡。腰と足首につながったケーブルから必要なパワーを放出し、不要なエネルギーを削減できる。
ウォルシュ氏は、「私たちは人間側が足を慎重かつ正確に動かすということに神経を使わない。むしろ、最少の動きと、適切なタイミングで力が発揮できるようなロボットスーツの開発を望んでいる」と話す。Exosuitは現在、約50ワットで作動し、連続で4時間ほど使用できる。スーツ、アクチュエーター、バッテリーを含めた機器の重量は約6キロだ。
ソフトロボットの別の用途として、ウォルシュ氏のチームはリハビリテーション用手袋も開発している。複雑な機構や制御システムなしに手の動きをサポートすることができため、ウォルシュ氏はこの手袋が患者の物理療法のサポートに活用可能だとしている。
これまで、ソフトロボットは健康な人を対象に広くテストされてきた。ウォルシュ氏のグループは今後、エグゾスーツとリハビリテーション用手袋が、障害を持つ患者にも有用か判断するため臨床パートナーとの仕事を開始するとしている。
ウォルシュ氏の掲げた「ソフトロボット」というコンセプトは大きな成功を収めつつある。ウォルシュ氏は「柔らかく実際に機能するシステムをに作り、世間に公開できることについて非常に面白いと感じている。それは、物質・材料科学、ロボット工学、および生体力学にまたがる基礎研究の問いに、多くをもたらすでしょう」とその意義について話している。
photo by Wyss Institute (Via youtube)