世界的に水中ドローンの開発が活発に進められているなか、一般ユーザーにも簡単に操縦可能な潜水ドローンが開発され話題となっている。
その水中ドローンは、カリフォルニア州にある「オープンROV(OpenROV)」の共同創業者デヴィッド・ラング(David Lang)氏と、エリック・ストラックポール(Eric Strackpole)氏によって開発された。ドローンの名前は「トライデント(Trident)」だ。
ラング氏とストラックポール氏の潜水ドローン開発は約4年前に始まった。 2012年、南カリフォルニアの海中に沈んだ宝船を見つけるために潜水ドローンを計画し、クラウドファンディングサイト「キックスターター」での資金調達に乗り出した。当時、宝船を発見することには失敗したが、潜水ドローンに関するすべての情報をオープンソースとして人々に公開することでコミュニティを形成。潜水ドローンの画期的な発展を成し遂げることに成功した。潜水ドローン・トライデントは、初期モデルに比べてはるかに素早く、しかも見た目も非常にシンプルなものとなった。
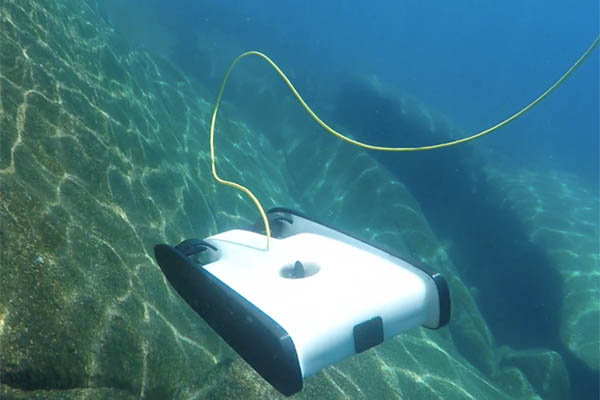
トライデントは流体力学的なデザインで水の抵抗を最小限に抑えることができる。同時に3つのスラスターを駆使し最高2m / sの高速で、海中を自由に航行することが可能。最大で水深100mまで探査することもできる。機体にはHD級高画質カメラと2つの前方LEDライトが搭載されており、リアルタイムで水中を観察することが可能で、険しい水中環境に耐えることができるよう側面は強いゴム素材で密封されている。
トライデントはまた、タブレットやPC、あるいはゲームコントローラなどを使い、遠く離れた距離からでも操縦できる。機体は水面に浮かブイと長いコネクタで接続されており、ユーザーは長距離WiFi経由でブイと操縦装置を接続、トライデントをコントロールする。
トライデントは錨綱の検査や難破船の探索、3D海底地図作成に使用することができる。オープンROV側はトライデントを活用して、ギリシャ・フィスカルドン地域の一部の3D海底地図を作成することに成功している。
現在、ふたたびキックスターターで出資を募っているトライデントは、既に目標金額50000ドルの7倍以上を集めた。トライデントは2016年10月にリリースされる予定で、価格は1199ドル(約14万円)になると予想されている。
photo by openROV
](https://roboteer-tokyo.com/wp-content/uploads/2022/11/795316b92fc766b0181f6fef074f03fa-150x150.jpg)








