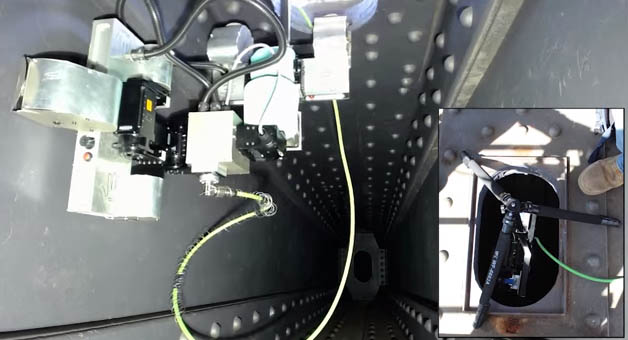
シドニー工科大学(University of Technology=UTS)のエンジニアと、ローズ&マリタイムサービス(Roads and Maritime Services =RMS)が共同で、建物をよじ登り作業するロボット「クロック(CROC)」を開発した。開発までに5年の歳月を要した同ロボットは、磁石の装着された足で壁を登ることが可能。人間の作業員が高所や狭い場所で行う作業を代替えできると期待されている。
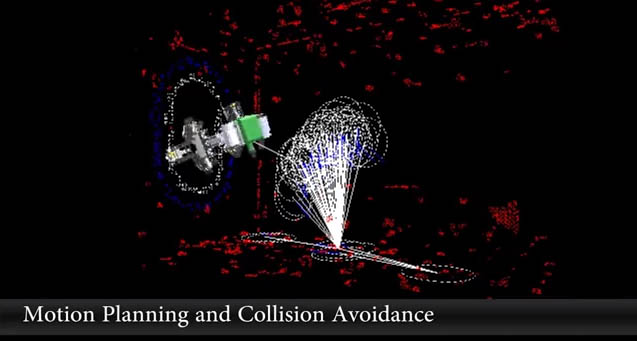
ロボットには、3次元センサーが搭載されており、暗くて狭い建物内部を行き来しながら3Dマップを自動で生成することが可能となっている。建物の下にいる作業員にリアルタイムで情報を伝え、作業員は建物の状態や損傷具合を見積もることができる。UTSからは「ユーザーインターフェースもシンプルで、非常に使いやすい」という説明付きで、動画が公開されている。
ABCニュースのインタビューに答えた橋梁点検員ローレント・マコヴィック(Laurent Matkovic)氏は、「狭いスペースに自分が入るより、ロボットを送った方がよい。何かハプニングがあったら閉じ込められてしまうからね」と話している。

陸橋の内部をはじめ、複雑な建造物には人間が調査をしなければならない狭いスペースが多い。RMSのインフラストラクチャー戦略マネージャー、ピーター・マン(Peter Mann)氏は「(中に入った従業員が)窒息してしまう危険性がある。橋の内部の空気の状況はひとつの問題」と指摘。「また緊急時の救助も差し迫った課題だ。そのため、今後はロボットを送って危険な作業をさせた方がよいのではないでしょうか」と提言している。
もしこれまで人間が作業してきた危険な建物内部で、ロボットがパフォーマンスを存分に発揮できるとなれば、今回開発されたようなロボットの有用性はますます注目されるのではないだろうか。
加えて人間が作業をするのに危険な場所としては、倒壊した建物などが他にも挙げられる。そのような災害現場では、ソフトロボットの開発が期待されている。一方、建物や構造物の特性によって、ロボットの仕様も変わってくるはずだ。例えば、今回は磁石でできた足で鉄壁をよじ登るということだが、アスファルトでできた建物内部では効果は発揮しにくいだろう。いずれにせよ、人間にとって危険な場所で活躍するロボットの性能向上が期待される。
(ロボティア編集部)