従来のように硬い素材ではなく、柔らかい素材で作られたロボット=ソフトロボットが次々と開発されている。
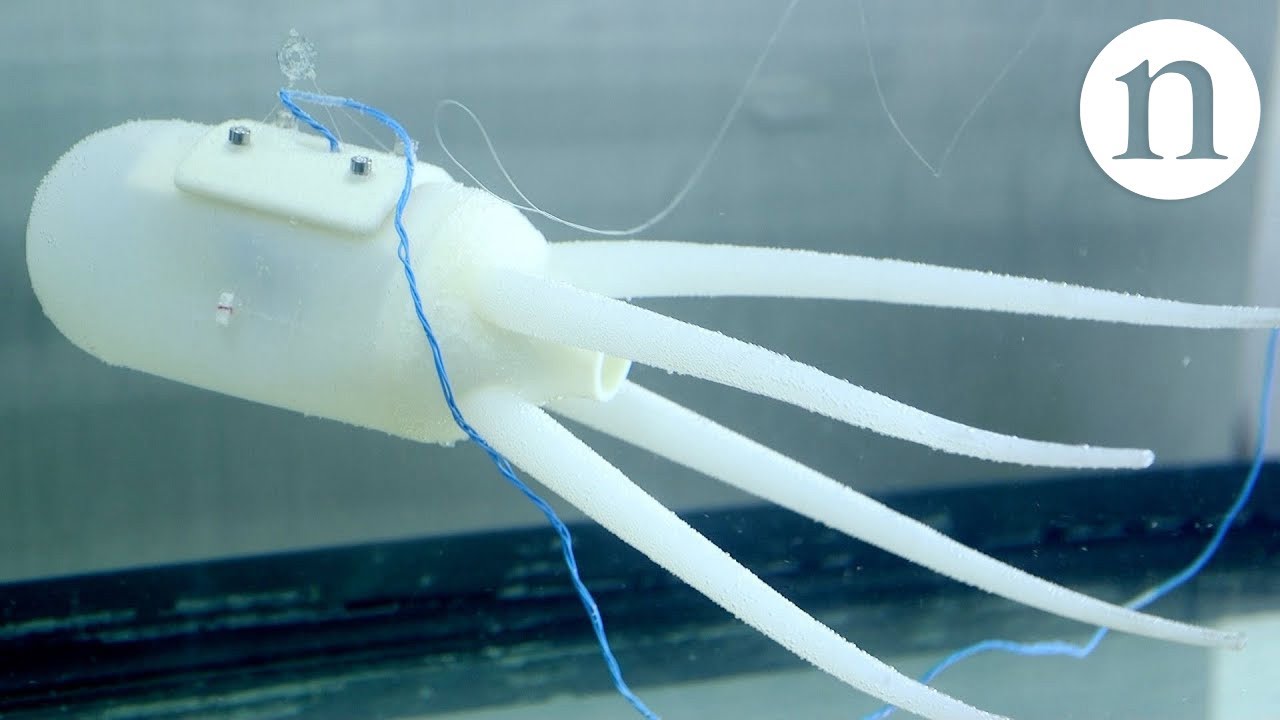
科学紙「ネイチャー」によれば、ソフトロボットという概念が登場したのは2007年頃だという。世界で初めてタコ型ロボットの研究を開始した、ロボット工学者セシリア・ラスチ(Cecillia Laschi=イタリア人女性)は、ネイチャーニュースに対して「私が初めてタコを使って研究を始めたとき、人々はなぜそのような研究をするのかと尋ねた(中略)ですが今後、研究が成功すれば、非常に多くの分野に応用されると確信している」と述べている。

現在、タコだけでなく、幼虫やクラゲ、ヤツメウナギに至るまで、様々な軟体動物の動作を真似る、ソフトロボットの開発が試みられている。
きたる2016年4月29日から30日までの2日間には、イタリアの港町「リヴォルノ」で、世界初となるソフトロボットコンテストが開催される。名称は第1回「ロボソフトグランドチャレンジ(The RoboSoft Grand Challenge)」。
EUの「7次フレームワークプログラム」の資金支援を受けて行われるもので、イタリアのバイオロボティクス研究所、英ケンブリッジ大、ブリストル大学などの専門家を中心に組織委員会が設けられた。障害物競争、水中レース、物体取り扱いなどの部門で競争が行わる予定だ。
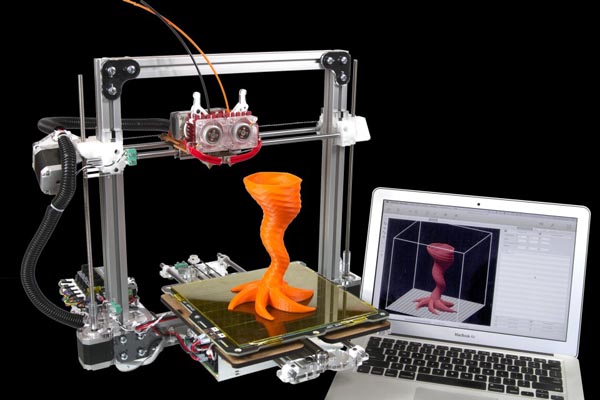
ネイチャーは、ソフトロボットの開発が進む背景のひとつとして、3Dプリント技術の発展を挙げている。これにより、困難と見られていた素材の加工を、安価にまた大量にこなせる可能性がでてきた。
今後、ソフトロボット技術がさらに発展すれば、軟体動物のように狭い空間に侵入できる「人命救助ロボット」として、また人間と安全に暮らすことができる「家庭用ケアロボット」として、加えて繊細な形状の物体を取り扱うことができる「産業用ロボット」として活躍することなどが期待されている。
ソフトロボットに実装されるべき重要かつメリットの高い動作技術としては「伸張」「伸縮」「モノを掴む」などが挙げられている。その中でも、様々な物体をソフトに優しく掴み上げることができるという側面に関しては、ソフトロボットが持つ大きな利点として注目を浴びている。
ハードロボットが対象を掴む場合、物の大きさ、形状、重量、表面の性質などの情報を事前に正確にプログラミングする必要がある。一方、ソフトロボットは事前に情報がなくとも、柔軟に物体を取り扱うことができる。例えば、カップやトマトをロボットが掴んで作業をするとしよう。ハードロボットはそのひとつ非常に異なる動作プログラムを入力する必要があるが、ソフトロボットは同じプログラム使って“柔軟”に作業をこなすことができる。
ソフトロボットがハードロボットの既存の機能をすべて代替えするのは難しいだろう。それでも、ソフトロボットの開発および研究、すそ野が広がっていけば、ロボットが行えるタスクの領域もまた広がってはずだ。