既存のロボットの多くは、デモンストレーション(demonstration)、もしくはモーションプランニング(motion-planning)のいずれかで動作をプログラムされる。前者はロボットに動作や作業を見せてコピーする方法、後者はプログラマーが特定の動作目標や制約事項を明確に定義する方法だ。
ただし、いずれの方法にも欠点があると言われている。まずデモンストレーションを通じて学習したロボットは、自分が学んだ動作を他の状況やロボットに正確に伝えることが難しいという限界がある。一方、モーションプランニングは環境の変化に適応することができるものの、プログラマーが都度、コーディングし直す必要がある。
そこでMITの傘下機関であるコンピュータ科学・人工知能研究所(以下、CSAIL)は、それらふたつの方法を組み合わせた技術「C-LEARN」を開発した。C-LEARNはコーダー(coder)でなくとも、ロボットに新しい機能を簡単に教えることができ、しかもあるロボットが習得した動作を、他の環境や方法で動作する別のロボットに伝えることができるという。短時間かつ低コストで、複数台のロボットに似たような動作を実装するのに有用と説明されている。
MITのジュリー・シャー(Julie Shah)教授とともに研究を進めてきたクラウディ・ペレス・タルピノ氏は、「デモンストレーションから学習するできる直感的な能力と、モーションプランニングのアルゴリズムの精度を結合する方法で、ロボットがこれまでできなかった新しい形態の作業を実行できるよう、開発を進めることができるようになった」と述べている。
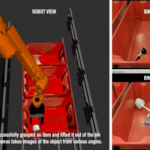
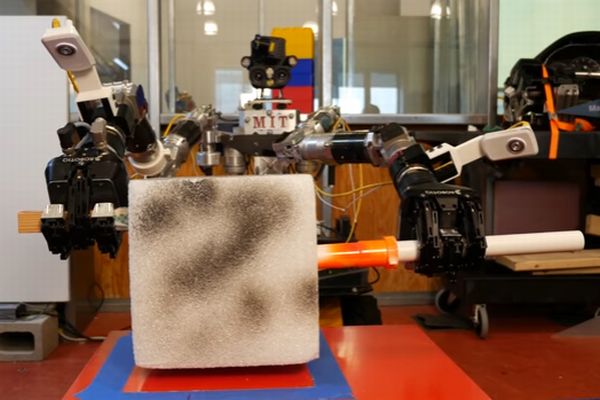
研究チームは、今回得られた技術的な成果を爆発物除去両腕ロボット「オプティマス(Optimus)」に採用。ドアを開けて、物体を移し、容器からのものを抽出する動作するようプログラミングした。続いて、シミュレーションを通じて、オプティマスコンがヒューマノイドロボット「アトラス」に、自ら学習した機能を伝えることにも成功したという。
研究チームは今回の研究成果を、IEEE(アイトリプルイー)が開催する「ICRA2017」(5月29日~6月3日、開催地:シンガポール)で紹介する予定だ。
photo by youtube