ネズミは複雑な道でも迷わず、簡単に抜け出す優れた能力を持っているとされる。というのも、その脳重量はわずか2gだが、見知らぬ地形にすぐに適応する非常に特殊なニューロンを持っているからだ。例えば、特定の対象物や境界線を認知するニューロン、また一定距離ごとに定期的に反応するニューロン、向かう場所を記憶するコンパスのようなニューロンなどだ。それらニューロンが複合的に機能し、ネズミは短時間で複雑な道を抜けていく。そしてその過程が繰り返されることで、ネズミが持つ能力はさらに向上する。
豪クイーンズランド工科大学(Queensland University of Technology:QUT)」のマイケル・ミルフォード(Michael Milford)、ゴードン・ワイス(Gordon Wyeth)教授チームは、そんなネズミの能力に注目。脳をモデル化したロボットナビゲーションシステムを研究している。研究者らは、ネズミの脳を模倣したロボットが登場すれば、高価な部品が必要なくなり、低コスト高性能なロボットを実現できると期待している。
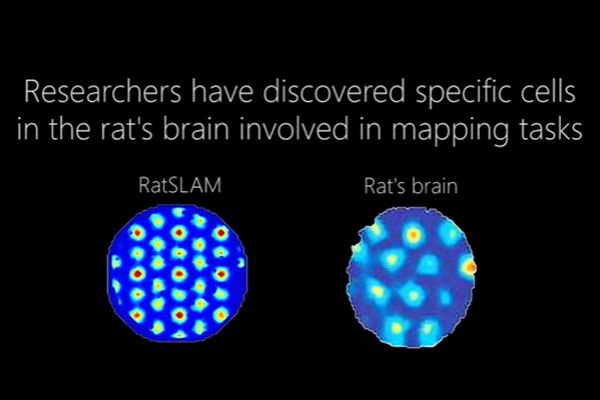
GPSや3Dライダーのような装置は、室内空間や地下空間では力を発揮しにくい。そのため、ロボット研究者たちはSLAM(simultaneous localization and mapping)という方法を通じて室内空間でマップを作成し、道を見つけるという技術を研究中である。QUTの研究者たちは、ネズミの脳を模倣するという側面から、自らの研究成果を「ラットスラム(RatSLAM)」と名付けている。
QUTの研究者によると、ネズミは道を脱出するために頭の中に地図を作らないという。それでも、ネズミは自分の場所を特定する独自の方法を持っている。ネズミの位置細胞(place cell)と方向検出細胞(head-direction cell)が存在するのだが、それらが特定の対象物を確認したり、方向を測定するのに役立てっているというのだ。
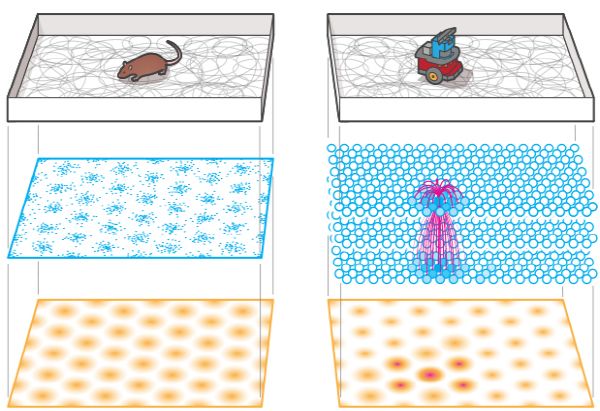
研究チームは、そのようなネズミの能力に注目し「アトラクターネットワーク(attractor network)」と呼ばれる人工ニューラルネットワーク技術を開発した。ただ当初、それほど試みがうまくいかなかったという。ロボットは2㎡のテストスペースで適切な方向を定められず、時にスペースから逸脱した。研究チームは、その不具合を修正するために「姿勢細胞(pose cell)」と呼ばれる新たなニューロンをつくり、ロボットに適用。姿勢細胞は、ロボットの位置と方向を同時に把握できるニューロンなのだが、結果としてロボットのナビゲーション能力が大幅に改善したという
研究チームは、「私たちが考案した人工細胞は、ノルウェーの神経科学者たちが発表した格子細胞(grid cells)ではないが、同様の機能を持つ」としている。
現在、QUT科学者たちは建設重機メーカー・キャタピラーと提携。地下鉱山で使用される採掘用車両のナビゲーションシステムに、研究中の技術を適用するプロジェクトを進めている。地下鉱山は3DライダーやGPSが使用するのは難しい場所のひとつ。加えて、非常に暗くほこりも多い。そこで研究チームは、ラットスラム技術を活用しつつ、地下空間での人や機器の移動を追跡するシステムを開発する計画だという。今後は自動車にも適用し、ナビゲーションの研究に活用していく方針だそうだ。
■関連記事
東北大学「ダンスを教えるロボット」開発中…トレーニングやリハビリで活用
ハッキングで産業用ロボットが”悪党”に…企業が身代金を要求される!?
倉庫用ロボット「リトル・オレンジ」が1日20万個の荷物を仕分ける
photo by TheQUTube









