「DJI製品は、発売が開始された数年前に比べて、安定性などの側面でレベルが格段に向上しています。正直、初期の製品は原因が不明な落下事故を起こすケースも多々ありましたが、最近ではそのようなことがほぼ皆無になってきています。なかでもM210は、測量や点検用途で使う産業用ドローンとして要件を満たしている。今後、現場で使うことを想定した場合に戦力になると踏み、今回のコンペでの採用を決めました」
※機体の詳細レビューについてはこちら
「KELEK×F」はシカ検知コンペティションに備え、9月11日にリハーサルを敢行し、サーマルカメラを使った検知効果のテストを実施している。テストの舞台となった場所は東京都・八王子市高尾にある自然豊かな空き地スペースだ。同スペースは機械メーカー・菊池製作所が、ドローン研究・実験用に事業パートナーに開放している“ドローン実験場”である。
リハーサルの結果、サーマルカメラをシカ検知に利用していくにあたって、いくつかの課題が明らかになった。なかでも「撮影・飛行高度」と、サーマルカメラの「解像度」のバランスをいかに保つかという課題の浮上は、ドローンの実質的な運用を念頭に置いた場合、示唆に富んだものとなった。
700m×200m(140000㎡)の敷地、飛行時間15分以内というコンペティションの条件は前述したが、同条件でシカを上手く検知するためには、効率良く広い範囲のデータを取得しながら、解像度を高く取得する必要がある。高度が高ければ、一度の飛行でカメラの画角におさまる対象の敷地面積は増えるが解像度が悪くなる。逆に高度が低いと、一度の飛行で得られる撮影データは制限されるものの、高い解像度のデータが得られる。15分という制限時間があるので、作業の効率性と画像データの精度のトレードオフがあるなかで、高度や飛行経路をどのように設定するかも勝負のポイントとなる。
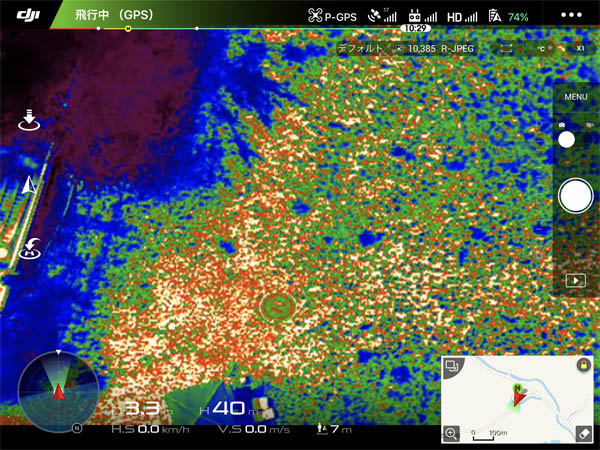
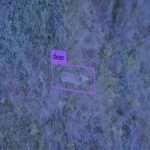
「今回の実験では、一定の高度を飛行した場合、サーマルカメラでシカをどの程度検知できそうか確認しました。ただその条件だと、画像の解像度が荒くなってしまう。もう少し具体的に言うと、シカと地面などの熱データが同化してしまって見分けがつかなくなります。コンペティションで勝つためには、可視光カメラをどう併用していくかがネックになりそうですね」(十田氏)
リハーサルに参加した古河電気工業のエンジニア・阿久津剛史氏も、結果について思案を巡らす。